在目标检测中,非最大值抑制(Non-Maximum Suppression, NMS)能够有效去除冗余的候选边界框
实现流程
- 输入一组候选边界框以及对应的置信度(通常为分类概率)
- 通过置信度进行排序
- 保留置信度最高的候选边界框
- 计算保留的候选边界框和剩余边界框的
IoU - 去除
IoU超过阈值的剩余边界框 - 对剩余的边界框重复
2-5步,直至剩余边界框清空
阈值设置
通常为0.3-0.5
numpy实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
| def nms(rect_list, score_list):
"""
非最大抑制
:param rect_list: list,大小为[N, 4]
:param score_list: list,大小为[N]
"""
nms_rects = list()
nms_scores = list()
rect_array = np.array(rect_list)
score_array = np.array(score_list)
idxs = np.argsort(score_array)[::-1]
rect_array = rect_array[idxs]
score_array = score_array[idxs]
thresh = 0.3
while len(score_array) > 0:
nms_rects.append(rect_array[0])
nms_scores.append(score_array[0])
rect_array = rect_array[1:]
score_array = score_array[1:]
length = len(score_array)
if length <= 0:
break
iou_scores = util.iou(np.array(nms_rects[len(nms_rects) - 1]), rect_array)
idxs = np.where(iou_scores < thresh)[0]
rect_array = rect_array[idxs]
score_array = score_array[idxs]
return nms_rects, nms_scores
|
实现结果
参考zjZSTU/R-CNN的py/car_detector.py
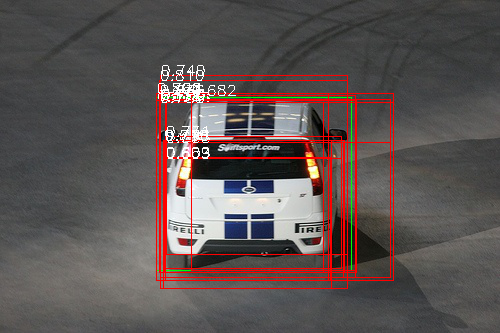
实现前:
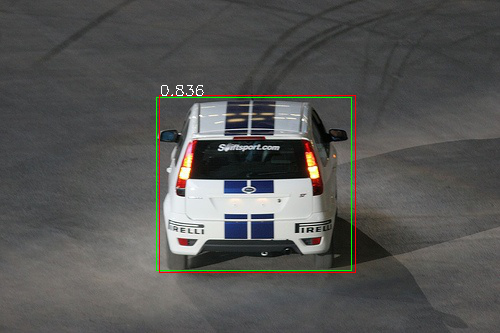
实现后:
相关阅读