1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
|
"""
@author: zj
@file: iou-compute.py
@time: 2020-01-19
"""
import numpy as np
import torch
import cv2
def numpy_iou(target_boxes, pred_boxes):
"""
target_boxes和pred_boxes大小相同:[N, 4],其中N表示边框数目,4表示保存的是[xmin, ymin, xmax, ymax]
"""
xA = np.maximum(target_boxes[:, 0], pred_boxes[:, 0])
yA = np.maximum(target_boxes[:, 1], pred_boxes[:, 1])
xB = np.minimum(target_boxes[:, 2], pred_boxes[:, 2])
yB = np.minimum(target_boxes[:, 3], pred_boxes[:, 3])
intersection = np.maximum(0.0, xB - xA) * np.maximum(0.0, yB - yA)
boxAArea = (target_boxes[:, 2] - target_boxes[:, 0]) * (target_boxes[:, 3] - target_boxes[:, 1])
boxBArea = (pred_boxes[:, 2] - pred_boxes[:, 0]) * (pred_boxes[:, 3] - pred_boxes[:, 1])
iou = intersection / (boxAArea + boxBArea - intersection)
return iou
def pytorch_iou(target_boxes, pred_boxes):
x_min = torch.max(target_boxes[:, 0], pred_boxes[:, 0])
y_min = torch.max(target_boxes[:, 1], pred_boxes[:, 1])
x_max = torch.min(target_boxes[:, 2], pred_boxes[:, 2])
y_max = torch.min(target_boxes[:, 3], pred_boxes[:, 3])
intersection = torch.max(torch.zeros(x_max.shape), x_max - x_min) \
* torch.max(torch.zeros(y_max.shape), y_max - y_min)
boxAArea = (target_boxes[:, 2] - target_boxes[:, 0]) * (target_boxes[:, 3] - target_boxes[:, 1])
boxBArea = (pred_boxes[:, 2] - pred_boxes[:, 0]) * (pred_boxes[:, 3] - pred_boxes[:, 1])
iou = intersection / (boxAArea + boxBArea - intersection)
return iou
if __name__ == '__main__':
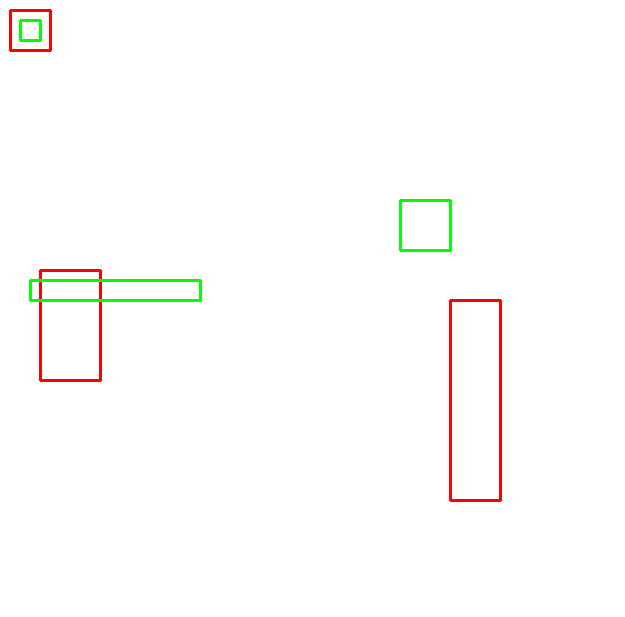
target_boxes = np.array([[10, 10, 50, 50], [40, 270, 100, 380], [450, 300, 500, 500]])
pred_boxes = np.array([[20, 20, 40, 40], [30, 280, 200, 300], [400, 200, 450, 250]])
iou1 = numpy_iou(target_boxes, pred_boxes)
iou2 = pytorch_iou(torch.Tensor(target_boxes), torch.Tensor(pred_boxes))
print('numpy:', iou1)
print('pytorch:', iou2)
img = np.ones((650, 650, 3)) * 255
for item in target_boxes:
xmin, ymin, xmax, ymax = item
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), (0, 0, 255), thickness=2)
for item in pred_boxes:
xmin, ymin, xmax, ymax = item
cv2.rectangle(img, (xmin, ymin), (xmax, ymax), (0, 255, 0), thickness=2)
cv2.imshow('img', img)
cv2.waitKey(0)
|